Measurement Systems for Robotic Applications
Code:
Measurement Systems for Robotic Applications
They are used to detect the start and end of the welding bead or locate the joint during welding, changing the position of the robotic torch in order to provide an accurate weld even in non-uniform parts. It has perfect applicability in processes that use non-standard pre-assembled parts.
Through the Welding Arc
• Locates the joint by measuring the electric arc during the seam weld.
Touch Sensor
• Locates the start and end of the joint by touching the wire.
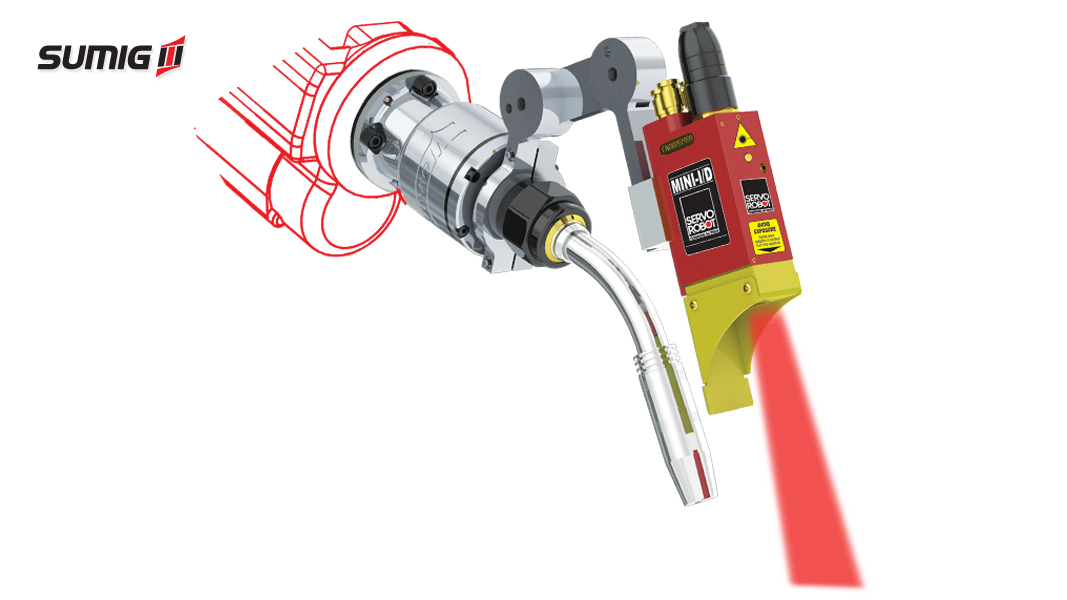
Laser Locator
• Locates the start and end of the joint using a laser beam, increasing the accuracy of the location.
Laser Joint Locator
• This system detects variations in joint location and adjusts the torch position in real time.